
Hannahbella Queiroz*
Um projeto em desenvolvimento no Laboratório de Robótica e Biomecânica do Departamento de Engenharia Mecânica da Ufes está preparando uma órtese de mão para pessoas que possuem dificuldades motoras em atividades do dia a dia. Coordenado pelo professor Rafhael Andrade, o projeto surgiu após o contato de um homem tetraplégico que, já sabendo da atuação do professor na área de tecnologias de reabilitação e assistência, expressou o desejo de possuir um dispositivo que pudesse ajudá-lo a pegar objetos. Na época, o laboratório não trabalhava com equipamentos de membros superiores, mas, diante do desafio, foi montada uma equipe com alunos da graduação e a pesquisa foi iniciada.
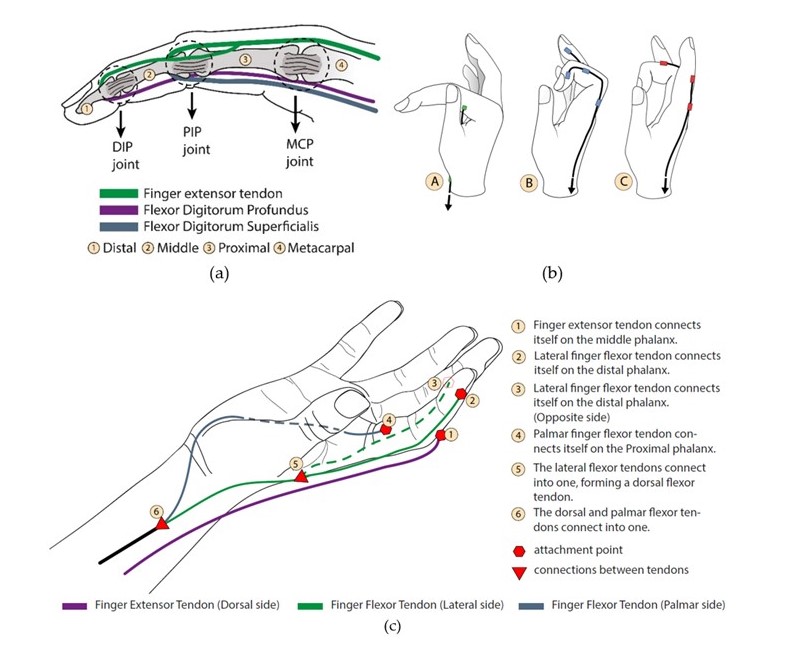
O primeiro protótipo não foi suficiente para suprir as necessidades do voluntário. Algumas mudanças foram feitas e saiu a segunda versão: a palma da mão ficou exposta para preservar a sensibilidade tátil do paciente e os dedos passaram a ser puxados através de tendões artificiais dimensionados de forma biomimética — o que faz com que se assemelhe à anatomia humana. Assim, usa-se os tendões artificiais paralelos aos tendões flexores e extensores dos dedos para realizar um movimento mais confortável.
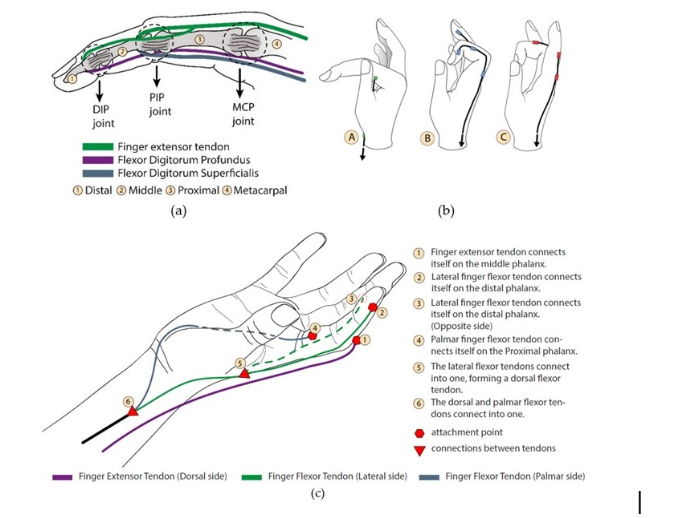
A órtese é ativada por meio de sinais elétricos musculares do bíceps; a contração do músculo é interpretada pelo sistema como intenção de abrir ou fechar a mão. Ela deixa a palma da mão livre para que a pessoa possa ter maior contato com os objetos e, se for o caso, permitir a sensibilidade tátil. Além disso, são utilizados tendões artificiais para melhorar o movimento das juntas. Cada dedo é movimentado por três tendões que geram movimentos independentes de flexão e extensão. A parte de motorização foi colocada de forma externa ao braço, tornando o dispositivo vestível e leve.
Em colaboração com o professor Guilherme Lepski, da Faculdade de Medicina da Universidade de São Paulo (USP), o protótipo foi preparado para ser utilizado também como um dispositivo de reabilitação, com resultados iniciais positivos. O próximo objetivo é implementar o movimento independente de cada dedo, para que a órtese realize diferentes posições a fim de melhorar a independência do usuário.
O projeto recebe financiamento da Fundação de Amparo à Pesquisa e Inovação do Espírito Santo (FAPES).
*Bolsista em projeto de Comunicação
Imagens: acervo da pesquisa
Edição: Sueli de Freitas
Que trabalho maravilhoso!!!!!
Preciso de mais informações de como fazer parte da pesquisa,tenho uma filha que tem hemiplegia do lado esquerdo a mão ficou sem movimento após um acidente.
Boa tarde!!!
Gostaria de mais informações sobre a pesquisa meu filho tem hemiparesia esquerda, seria importante para o tratamento.
Boa tarde. Desculpe a demora em responder. Favor verificar os contatos neste link: https://labguara.ufes.br/fale-conosco
Bom dia! Sofri AVC em 216 e perdi os movimentos da mão esquerda, a mão faz garra,como faço para testar essa luva robótica? Preciso de ajuda. Muito obrigada! Ah sou aluna da UFES ciências economicas. Agradeço muito
Boa tarde. Desculpe a demora em responder. Favor verificar os contatos neste link: https://labguara.ufes.br/fale-conosco